クッキーおよび客様のデータの保護
私たちは、ウェブサイトの機能向上、より良いユーザー体験の提供、そしてソーシャルメディア機能の実現のためにクッキーを使用しています。 「すべてのクッキーを許可する」をクリックするか、個別の設定を行うことで、ご同意いただいたことになります。 本ウェブサイトにおけるクッキーの使用に関する詳細情報は、データ・プライバシー・ステートメントをご覧ください。
こちらのクッキーは、サイトの運営に必要であり、セキュリティに関わる機能を有効にします。 また、お客様がログイン状態を維持するかどうかを判断し、このサイトと他のウェブサイト間を移動する際にサービスを利用できるようにします。
これらのクッキーは、ユーザーのナビゲーションを改善する目的で、当社ウェブサイトにおけるユーザーの行動を分析するために使用されます。収集されたデータはすべて匿名で評価されます。詳細については、データ保護サイトをご覧ください。
これらのクッキーは、関連性の高い広告を配信したり、広告の表示回数を制限したりするために使用されます。マーケティングクッキーは、その情報を広告主と共有することがあります(サードパーティクッキー)。データ処理の法的根拠は、ユーザーの同意に基づいています。。
BACK TO RESULTS (0)
Share:
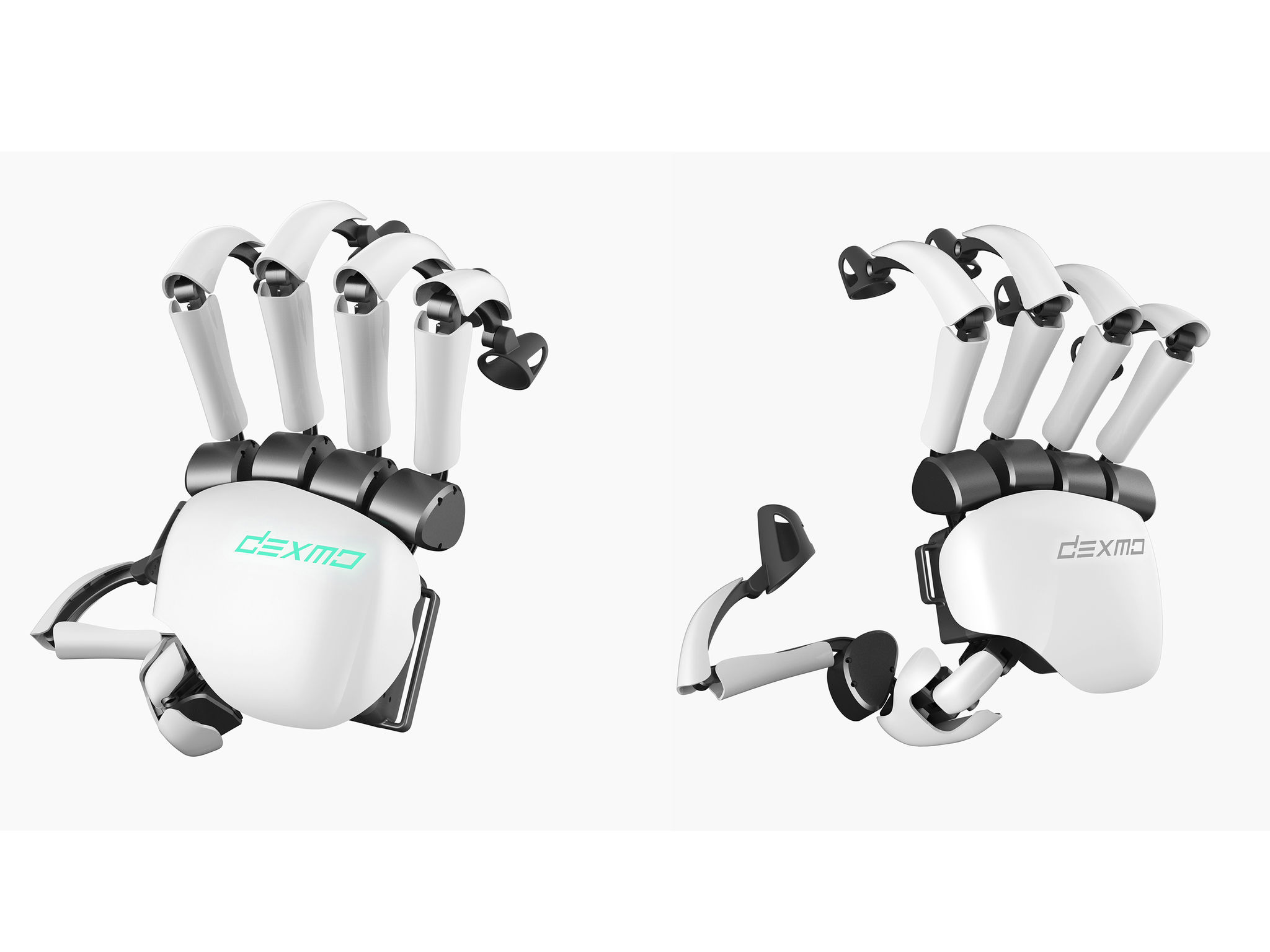
Dexmoは、手の動きを捉え、フォース・フィードバックを提供する機械式外骨格デバイスである。バーチャル・リアリティに使用することで、よりリアルな体験をもたらすことができる。技術とソフトウェアの発展により、医療、車両整備、軍事、その他の分野でさらなる応用が期待されている。全体的なブロック表面と半露出の内部構造により、DexmoはSF映画に出てくる「バイオニック」ハンドのような外観となっている。