
UAV
地震後の位置救助システム
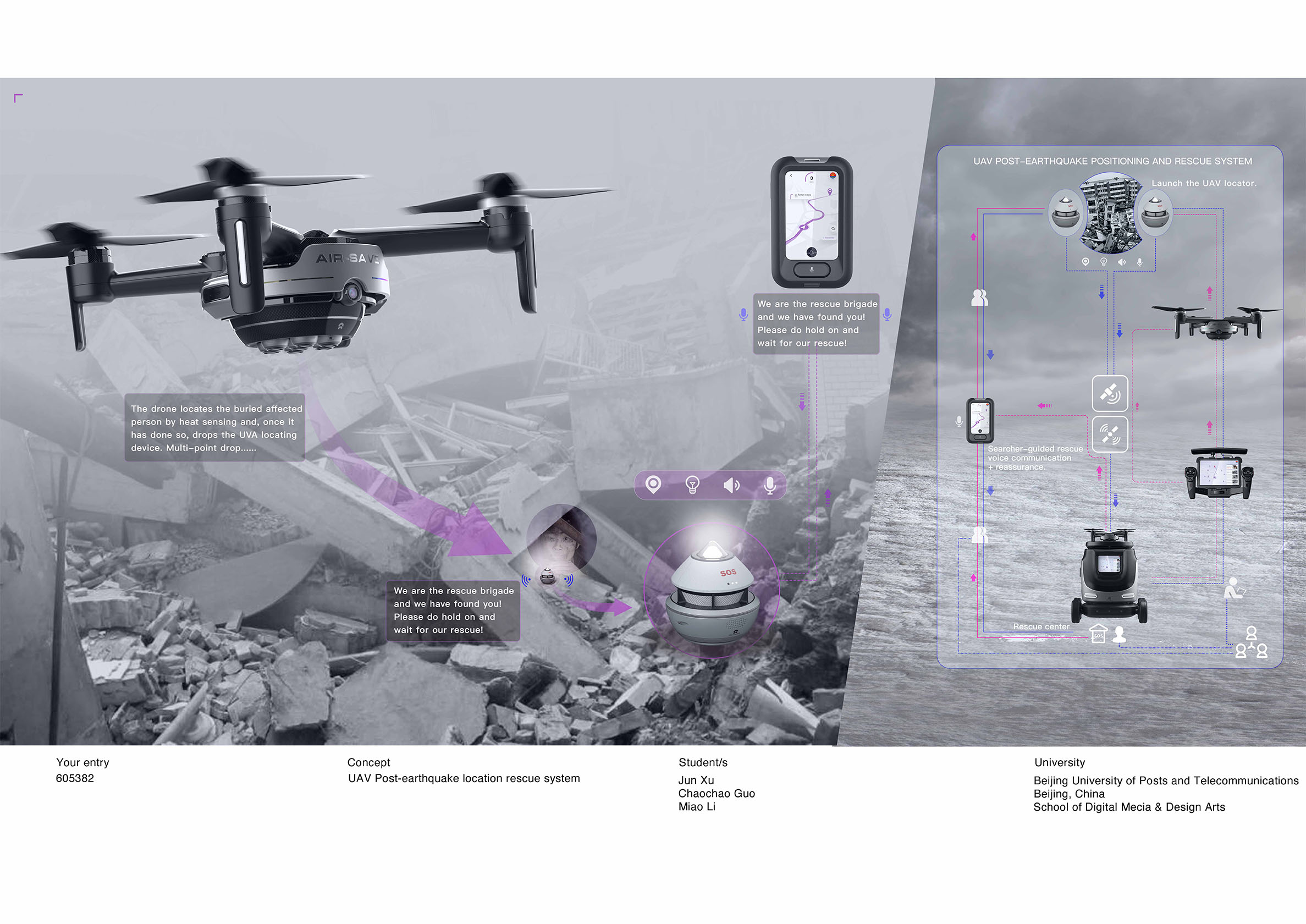
本システムは、端末ロボット、UAV、測位装置、リモコン、捜索員から構成される。端末ロボットが災害現場に到着すると、UAVは熱感知によって埋没者の位置を特定し、測位装置をその場所に投下するとともに、埋没者の状態に関する情報を無線で端末ロボットに送信する。このフィードバックに基づき、スタッフは救助隊を手配し、被災者の救護にあたることができる。UAV測位装置は、音声アナウンスで埋没者を励まし安心させながら、捜索救助隊員が迅速に救助を完了できるよう誘導する。
審査講評デザイン
UAVロケーターは、捜索救助活動の技術的な複雑さを理解した創造的なソリューションである。このコンセプトは、軽視されがちな製品システムにデザイナーの目をもたらしている。
受賞者ステートメントiF DESIGN STUDENT AWARDを受賞できて光栄です。このプロジェクトは、私たち一人ひとりの努力と知恵が結集したものであり、これからもそれを積み重ねていきたいと思います。iFの審査員の方々に感謝申し上げます。
大学Beijing University of Posts and Telecommunications
Beijing, CN